
Erik Billing
Bitr. professor i informationsteknologi


Syftet med KOMPARO är att öka förståelsen för hur robotisering, specifikt i form av människa-robotsamarbete (eng. human-robot collaboration, HRC), påverkar operatörens yrkeskunnande och känsla av kontroll i arbetet, samt hur kollaborativa robotar ska utformas för att stötta operatörens egen kompetensutveckling.
Projektet fokuserar på arbetsplatser inom svensk produktionsindustri och kommer leverera konkret tillämpbar vägledning för utformning av HRC, med fokus på att skapa en god arbetsmiljö i termer av operatörens kompetensutveckling och känsla av kontroll i arbetet.
Robotar har fått stor uppmärksamhet i media under de senaste åren, och med de senaste framstegen inom generativ artificiell intelligens har de blivit ännu mer framträdande.
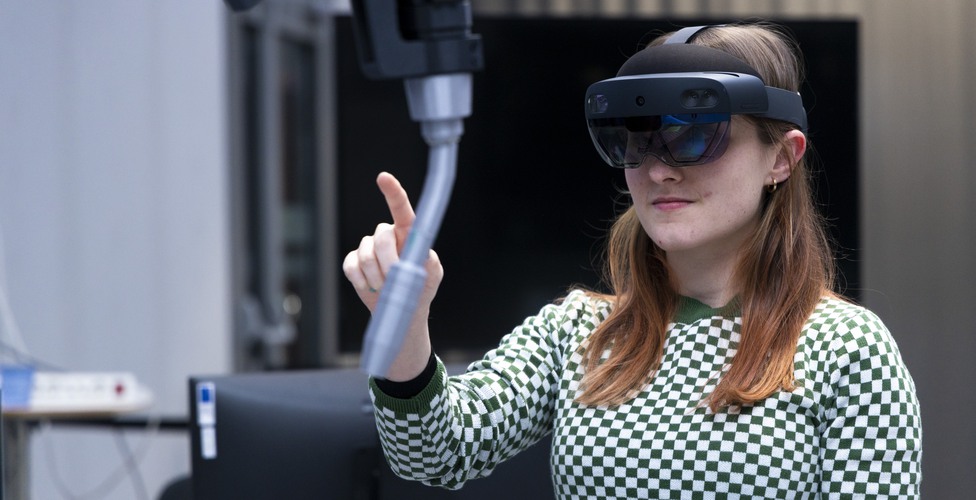
Kollaborativa robotar finns redan inom ett växande antal arbetsplatser i Sverige. Dessa arbetsstationer innebär ofta nära fysisk interaktion mellan människa och robot, vilket påverkar arbetsmiljö och säkerhetsrutiner. Dessa förändringar kräver nya perspektiv där roboten inte längre är en autonom produktionsenhet, utan en medproducent tillsammans med den mänskliga operatören.
KOMPARO kommer, i samarbete med Volvo Lastvagnar och Scania, utreda både potentiellt positiva och negativa effekter på operatörens yrkeskunnande och känsla av kontroll i arbetet, som ett resultat av HRC.
Resultaten från KOMPARO kan till exempel handla om i vilken utsträckning roboten ses som ett verktyg som operatören har kontroll över, en kollega som operatören samarbetar med, eller som en autonom maskin som operatören övervakar.
Genom utformningen av arbetsstationen kan operatörens upplevelse av samarbetet påverkas, vilket i sin tur förväntas ha stora effekter på operatörens känsla av kontroll och eget yrkeskunnande.
